动电容式电位监测器原理和结构参数设计
航天器表面充电到高静电位会导致静电放电(ESD),从而影响甚至破坏卫星电子器件。静电放电事件大多与各种表面材料之间的差异带电有关,因此研究不同表面材料在空间的充电电位对于控制航天器表面静电放电事件至关重要。本文介绍了用于测量表面电位的静电感应式位监测器的工作原理,并且对探头部分设计参数的选取进行了数值模拟计算研究,用于设计参数的选取和优化。
航天器静电放电(ESD)与各种表面材料之间的差异带电密切相关,但是差异带电直接在轨测量很少,目前只能通过航天器表面材料样品设备来测量。卫星上搭载过的表面电位传感器有两种类型。一类是电荷板分析器(CPA),此类传感器搭载在INTELSAT 航天器和印度的GSAT-2 卫星上,其卫星表面充电设备的探头采用电容分压原理测量技术监测卫星在轨表面充电事件。另一类方法是利用电场传感器(SPM)测量表面电场,典型的是P78-2 SCATHA 上搭载的表面电压监测器(SSPM),工程试验卫星V 搭载的电位监测器(POM) 和Defense Satellite Communication System-III B7(DSCS-III B7)航天器上的表面电压监测器(SPM)。本文主要研究SPM 类型的探测器。
1、SPM 测量原理
SPM 设计中考虑的首要因素就是测量不能改变介质材料上累积的电荷,因此高阻抗电场传感器更有优势,静电计多采用高阻抗电场探针。
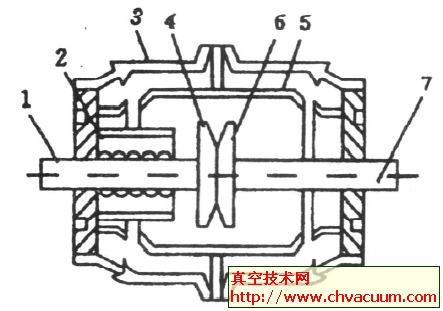
振动电容式仪表探头电极是一个可振动的金属片,在振荡器的驱动下,探头电极与被测带电体之间的电容周期性变化,被测带电体在探头电极上感应出一个周期性变化的电位信号,因为此信号非常微弱,故采用高阻输入的阻抗化器来接收信号,再经交流放大和相敏检波后显示被测电位。
为了达到足够的精度和分辨率,静电计多采用主动反馈闭环控制系统使得电场感应探针电位等于被测表面电位,而同步轨道航天器表面差异电位达到-20 kV,所以电路中必然需要一个输出为±20 kV 的“伺服放大器”,受到质量和功率的限制,这是不可行的。所以SPM 借鉴NASA’sLewis Research Center 表面电压传感器(SurfaceVoltage Sensor)的设计,既保留了反馈感应系统的优点,又不需要高电压。该系统利用组合电极来削弱带电表面产生的电场,可以通过一个低电压反馈信号将其削减为零,从反馈信号中输出测量电压信号,其原理如图1 所示。
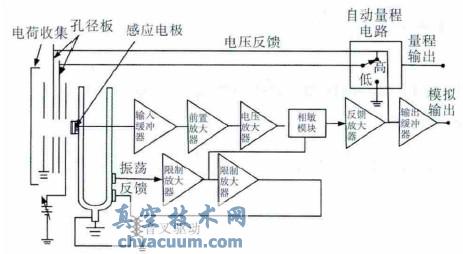
图1 SPM 工作原理图
SPM 的工作过程:感应电极在电荷收集板电场中振荡产生位移电流,正比于电场,电流频率等于振荡频率。此电流信号经过放大处理之后变为电压信号输出,同时经由反馈电路施加到补偿电极上,此电压与电极板电压在感应电极处合成电场为零。一旦电场变为零,则感应电流为零,补偿电极上电压为零,则感应电极只处在电荷收集板电场中,再次出现感应电流,重复上述过程,实现表面电压的实时监测。
通过设置适当的几何参数比如屏蔽电极和补偿电极孔径以及二者间距等,可以使电荷收集板电压为补偿电极上电压的200 倍(低量程0 kV~2 kV)、2000 倍(高量程0 kV~20 kV),感应电极处的微小电压放大到0 V~10 V 之间输出,同时反馈给补偿电极,输出的电压信号×200 即得航天器表面电位。这样就能将后续电路伺服放大器的输出由±20 kV 降低到±10 V,从而降低了航天器用表面电位监测器的质量和功耗。
SPMs 探测器可以更换前表面样品材料,通过整体替换绝缘环孔、输入电极和前表面材料来实现。前表面材料包括但不仅限于Kapton,Kapton上涂导电黑漆,白漆,太阳电池、二次表面散热镜和悬浮导体(比如锗)等,这样SPM 就可以在轨监测航天器各种表面材料的充电情况。
3、结论
本文阐述了振动电容式表面电位监测器SPM反馈感应系统的设计原理,并且通过数值模拟计算的方式论证的几何设计参数与美国FMDS 航天器表面电位监测器的典型参数基本一致,证明我们的计算模型是有效的,在我国研制SPM 的设计过程中可以用于结构设计参数的选取和优化。