真空拾取器拾取动作响应时间与影响因素的研究
小型真空拾取器被广泛应用于轻质小型元器件的搬运机构之中。通常要求真空吸取器在执行搬运作业时其拾取动作尽可能迅速,其总响应时间为阀门动作、抽气降压和工件运动三部分响应时间之和。本文通过理论推导得到了工件运动响应时间的计算公式。借助fluent 软件,模拟计算了抽气管道内的气体扩散降压流动过程,并讨论了真空管道长度与直径、储气罐容积等因素对抽气响应时间的影响。计算结论指出了提高真空拾取器响应速度的有效途径。
小型真空拾取器在IT 行业中被广泛应用于轻质小型元器件(如石英晶片、片式电阻电容元件、小型集成块等) 的搬运机构之中。生产过程通常要求真空拾取器在执行搬运作业时其拾取动作尽可能迅速,以提高生产效率。已有学者研究了采用真空发生器的拾取器系统的吸附响应时间,本文将以采用真空泵的真空拾取器系统为对象,针对拾取动作响应时间及其影响因素,开展理论分析和计算研究。
1、真空拾取器结构与工作原理
真空拾取器系统由吸盘、抽气管道、换向阀门、储气罐、主真空管路等部分组成,如图1 所示。

图1 真空拾取器系统结构示意图
1 —工件样品;2 —真空吸盘;3 —抽气管道;4 —三通电磁阀;5 —储气罐;6 —主管路
从控制系统发布拾取动作命令开始,到真空吸盘将工件样品完全吸牢为止,整个拾取过程的系统响应时间t 包括三部分:真空阀门接受命令至完全导通的动作响应时间t1 、真空管道开始抽气降压至工件样品开始移动的抽气响应时间t2 和工件样品运动至真空吸盘并吸牢的样品运动时间t3 。即
t = t1 + t2 + t3 (s) (1)
其中阀门动作响应时间t1 是由所选择元件的自身特性所决定的,能够由生产厂家提供其数据,通常在几十毫秒之内。而抽气响应时间t2 和样品运动时间t3 ,则完全是由真空拾取器系统的结构和工艺参数所决定的,下面分别加以计算。
2、工件样品运动时间的计算
在忽略工件样品的不平整度等实际因素的近似下,样品在吸盘下方的受力为

式中d —吸盘口的有效内径(m) ; P0 —环境大气压力(105 Pa) ; P —吸盘入口区域的气体平均压力(Pa) ; m —工件样品的质量(kg) ; g —重力加速度(9.8 m·s - 2 ) 。样品发生运动的初始条件(以下标s 为标记)为

通过对流动的气体沿图1 中P0 点至P 点的流线应用伯努利方程 ,可以算得对应的气体流量为

其中ρ—大气的密度(~1.20kg·m- 3) ;δ—样品到吸盘的初始距离(m) ;
本文后面的计算表明,在样品开始运动之后(取F=0 时为时间原点t = 0) ,吸盘内的气体平均压力随时间近似成线性降低趋势,即有:
![]()
式中α—压力递减系数( s - 1) 。将式(5) 代入式(2) ,于是样品运动过程中的受力规律及运动方程为

经运算可以得到样品由开始运动到被吸盘吸附所需的时间为

分析式(7)可知,样品运动时间主要受样品质量、吸盘内径、样品与吸盘间距离、以及抽气管道的压力递减系数的影响。举例计算,当m = 2 g , d = 3mm ,δ= 2 mm ,α= 346 s - 1 ,则样品启动压力ps = 97.2kPa ,启动流量qs = 1.28 L ·s - 1 , 运动时间t3 =4.66ms。
3、抽气响应时间的模拟计算
真空拾取器的抽气降压响应时间t2 完全取决于系统的结构和工艺参数,包括真空吸盘的结构形状与尺寸、抽气管道的长度与直径、阀门的通导能力、储气罐容积、以及真空泵通过主管路对储气罐的抽速和所能达到的本底真空度。
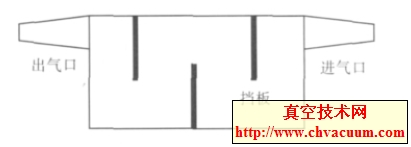
选择采用Fluent 软件对系统内部的气体扩散流动过程进行了数值模拟。针对所要模拟的真空拾取器系统,完全按照其真实尺寸建立计算模型。建模时将抽气管道简化为长直圆管;真空阀门也简化为一段直圆管道,其出口设为压力出口边界条件,利用UDF 编程将压力关于时间的变化考虑到计算中;储气罐内压力开始取为本底压力;在距离真空吸盘足够远的大气环境处,取无限远恒压边界条件。计算时选用耦合隐式非稳态求解器, 湍流模型选择S2A. 模型。计算时间步长为0.001s ,迭代次数为20 步。


图2 真空拾取器的FLUENT模型 图3 真空拾取器入口压力与抽气时间的关系曲线