三维旋转喷枪射流分析及机械和控制研究
原油储罐机械清洗作业中布置在浮顶上的喷枪产生三维旋转的射流,分别对罐底和罐顶进行冲刷,使沉积凝固的原油得以破碎和溶解,脱离所附着的罐壁表面,达到清洗的目的。笔者从机械清洗需要形成的射流轨迹入手,通过对结构、喷头运动、齿轮传动系统、气动控制系统的分析研究,设计出具备特殊结构的三维旋转喷枪使其能够满足清洗工程的需要。射流轨迹分析是已知喷枪需要达到的功能的情况下分析喷头的运动模式。喷头运动分析以射流轨迹分析的结果作为输入条件,分析出结构上的几何关系。齿轮传动系统设计以运动分析为基础,计算出喷头自转速度和与公转轴线夹角速度之间的关系,并确定适当的结构和传动比。气动控制系统设计为传动系统提供合适的动力,以及控制喷头在一定的角度范围内摆动。通过对以上关键技术的分析研究,设计出满足原油储罐机械清洗工程需要的三维旋转喷枪。
1、引言
我国目前已经成为世界第一石油消费大国,石油的战略和商业储备能力近两年里突飞猛进,据不完全统计已经投用和开始建设的储存总量达到1 亿吨以上,而且单台储罐的规格基本上都是5 ~ 10 万m3,现在中石油某企业正在研究15 ~ 20万m3 的储罐。由于储存的原油量大,且具有易燃、易爆、污染环境的特性,大型原油储罐一旦发生事故,将造成严重的经济损失和环境污染,而且可能酿成重大火灾及爆炸事故。为了确保储罐完整性及其使用安全,在原油储罐的实际运营中,需要定期停产检修。中国石油天然气行业标准SY/T 5921—2002 规定: 新建油罐第一次开罐检修的时间最长不超过10 年,第二次及以后开罐检修周期一般为5 ~ 7 年。原油储罐在检修前必须清洗干净,而且不能造成资源浪费和环境污染,还要确保清洗过程的安全,因此原油机械清洗系统应运而生。而本文所探讨的三维旋转喷枪正是该系统的核心设备。原油储罐机械清洗作业中布置在浮顶上的喷枪产生三维旋转的射流,分别对罐底和罐顶进行冲刷,使沉积凝固的原油得以破碎和溶解,脱离所附着的罐壁表面,达到清洗的目的。从机械清洗需要形成的射流轨迹入手进行分析,应用运动学原理及机械传动理论和喷射技术等知识,可以设计出满足原油储罐机械清洗工程所需要的喷枪结构,产生所需要的三维旋转射流。
2、射流轨迹分析
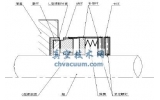
原油储罐机械清洗作业中将喷枪安装在浮顶的支腿套管中,喷头处于浮顶与罐底之间。喷头旋转的轨迹如图1 所示。

图1 喷枪射流轨迹
从清洗的目的出发需要有2 种区间清洗模式( 底部清洗模式和顶部清洗模式) 以及全方位清洗模式。
真空技术网(www.chvacuum.com)认为底部清洗模式: 由于浮盘落底后从浮顶到罐底的距离很短,一般是1 ~ 2m,所以当喷头与垂直方向所成的夹角很小时( 45°以内) ,射流在底部覆盖的范围也很小,这部分很小的面积可以由布置在相邻位置的其它喷枪所产生的射流覆盖到或在全方位清洗模式时进行清洗。由此,把喷头向下摆动的极限位置设为45°是比较合理的。当喷头与垂直方向的夹角从45° 向上摆动时,需要喷头同时绕垂直轴线做旋转运动,则喷头喷出的射流在底面上形成从内逐渐向外扩展的螺旋形轨迹,在夹角小于90°的范围内由于射流直射在底面上有非常好的冲刷清洗效果,但为了使射流能打到尽量远的位置,应将喷头向上摆动的极限位置设在105°,此时射流为抛物线,虽然打对底板的打击力减弱,但射程是最远的,同时布置在侧壁附近的喷枪可以对侧壁形成很好的清洗效果。由此得出底部清洗模式时清洗轨迹是45° ~ 105°范围内的螺旋形轨迹。
顶部清洗模式: 底部清洗模式时的摆角上极限为105°,为了清洗时尽量覆盖到所有的区域,同时105°开始向上舞动,射流即可打到顶部,所以顶部清洗模式的下极限位置定为105°。从105°开始喷头向上摆动,射流在顶板上形成由外向内的螺旋形轨迹,但由于结构上的限制喷头与喷枪管轴线不可能形成180°,因为要实现喷头三维旋转需要喷头与喷枪管通过斜面配合,喷头绕斜面的轴线摆动和同时绕喷枪管的轴线旋转。所以当喷头绕斜面的轴线转过180°时喷头与喷枪管轴线所成夹角为135°,不过由于喷头与顶板距离非常近,135° ~ 180°范围内为一个非常小的面积,通过合理的喷枪布置,可以由相邻的喷枪清洗到这部分面积。所以顶部清洗模式时,清洗轨迹为105° ~ 135°范围内的螺旋形轨迹。
3、三维旋转喷枪结构设计
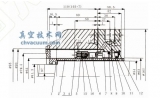
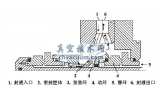
由以上对原油储罐机械清洗作业中喷枪所需要形成的清洗轨迹的分析,设计喷枪的结构如图2 所示。

图2 三维旋转喷枪结构
三维旋转喷枪由气动马达、减速机、齿轮传动系统、角度指示器、枪管、外轴、内轴、喷头以及气动控制系统等组成。气动马达输出的动力经减速机减速后由齿轮传动系统分别传递给外轴和内轴,外轴形成喷头绕喷枪轴线的旋转运动———公转,内轴的旋转形成喷头绕自身轴线的旋转运动———自转,或由气动控制系统控制喷头在一定角度范围内摆动。
7、结语
原油储罐机械清洗工程中三维旋转喷枪是最终的执行机器,如何形成满足清洗需要的清洗轨迹并实现具有在一定角度范围内反复清洗和全方位清洗模式的功能并能在不同模式间切换是关键的技术难点。笔者对清洗轨迹和喷头的运动进行了分析,并对总体结构、齿轮传动系统、气动控制系统的设计进行了简要的阐述。论述了清洗喷枪三维旋转射流的成因。设计的三维旋转喷枪已成功应用于原油储罐机械清洗工程,如新疆吐哈油田、镇海国家石油储备基地原油储罐的清洗工程等,验证了分析和设计是科学的。