基于Pro/E和ADAMS的步进机构的仿真
步进机构通过扳手的往复摆动带动驱动销, 由驱动销驱动驱动板, 再由驱动板上的孔和推杆之间摩擦, 实现自锁, 从而驱动推杆实现步进运动。采用摩擦角以及全约束力的作图法对该机构关键参数进行了求解, 运用Pro/ E 建立此运动机构3D 模型, 导入ADAMS 软件进行该机构的运动学和动力学分析, 为后续的设计和制造提供了一定的理论依据。
引言
虚拟样机技术可以使工程设计人员在虚拟环境中模拟产品关键机构的运动学及动力学特性, 快速分析出该机构的运动以及受力情况, 并且可以对物理样机无法进行测试的一些关键参数进行模拟分析, 直到获得最优产品为止。虚拟样机代替物理样机试验, 可以降低设计成本和提高设计质量。
我们通过采用摩擦角以及全约束力的作图法求解步进机构关键参数, 并把关键参数通过Pro/ E 建立3D模型, 然后导入ADAMS 里进行运动学和动力学的仿真分析。
1、步进机构工作原理及关键参数确认
1.1、工作原理介绍
从图1 所示的步进机构原理图可知, 此机构运动原理如下:
当扳手8 摆动时, 扳手就会相对于机座9 旋转, 扳手8 上的驱动销5 就会驱动驱动板4, 直至驱动板4 上孔与推杆2 表面接触并摩擦自锁后, 就会直接驱动推杆2 朝工件方向步进运动, 直至扳手8 向内侧转动结束, 这时推杆2 停止向前运动, 松开扳手8, 由于驱动板压簧3 和锁紧板压簧6 的作用下, 扳手8、驱动板4、锁紧板7 就会恢复到初时状态, 这时锁紧板7 上孔就和推杆2 相表面接触并摩擦自锁, 实现推杆2 的锁定( 推杆2 无法向后运动, 保证推杆2 步进的连续性) , 如果需要推杆2 能够向后运动, 就需要拨开锁紧板7。
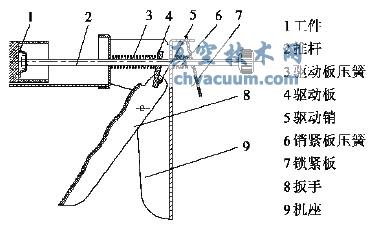
图1 步进机构原理图
1.2、关键参数的确认
1.2.1、驱动结构相关参数确定
(1) 材料选择。此机构所有的零件材料选为:Q235 ) A, 具体依据: 它是钢材里比较普通的材质, 成本低, 机械性能基本可以满足现机构的要求; 此材料的摩擦因数相对其他材料要大一点, 更容易实现摩擦自锁。
(2) 步进机构初步尺寸的确定。图2 为步进机构的参数图, 通过参考JM) 109 步进机构的参数, 具体数值如下: 推杆直径d1 = 4 mm; 驱动板孔直径D1 = 4. 5mm; 驱动板壁厚t1= 3 mm; 锁紧板孔直径D2= 4. 5 mm;锁紧板壁厚t 2= 1. 5 mm; 步进距离L1= 10 mm; 扳手转轴孔的位置: L0x = 20 mm, L0y = 31 mm; 驱动销直径d2= 3 mm; 扳手上部分转动半径r , 需要通过下述计算才可以确定参数为何值时, 才能够保证在整个步进运动中, 驱动板和推杆表面接触并摩擦自锁; 推杆和驱动板孔、推杆和锁紧板孔之间的静摩擦因数为f s = 0. 2。
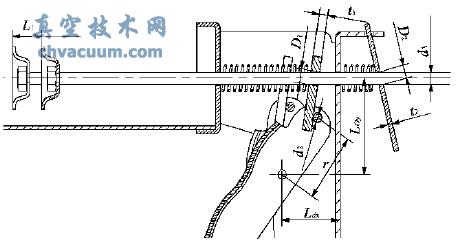
图2 步进机构参数图
4、结论
通过采用摩擦角以及全约束力作图法求解步进机构能够实现步进运动的关键参数, 并把这些参数通过Pro/ E 建立3D 模型, 导入ADAMS 软件进行仿真分析,通过仿真分析可以得到推杆的位移、速度、加速度曲线以及推杆和驱动板之间接触力曲线, 有助于发现模型中的问题以及代替部分物理样机的相关试验, 缩短开发周期, 提高工作效率。
本文中的分析是没有考虑零件精度、装配误差、零件的变形等因素的影响, 如果考虑这些因素, 本文中我们采用摩擦角以及全约束力作图法所求解出关键参数会有所变化, 以及ADAMS 所分析出的位移、速度、加速度和接触力也会相应的变化, 具体变化数值, 有待后续深入的去研究。