基于计算多刚体系统动力学的双级滑阀真空泵振动平衡研究
双级滑阀真空泵机构运动复杂,运用计算多刚体系统动力学方法进行分析计算,可以获得复杂动力方程的精确解。本文利用计算多刚体系统动力学分析了滑阀泵的振动平衡,推导了有关计算公式,综合了影响振动平衡的多项因子并建立了双级滑阀泵(双缸结构)的数学模型,计算了该泵平衡前后的支座反力和振动位移幅值。结果表明,计算结果与实验测试结果完全吻合,误差可以忽略。结果也说明计算多体系统动力学方法是可靠的计算方法,通过对双级滑阀真空泵的运动和动力分析可以得到各部件的动力学响应,其中包括双级滑阀真空泵的振动位移幅值,它直接反映了双级滑阀泵的振动现象,由此进行动平衡计算,从而达到降低振动的目的。
双级滑阀真空泵动平衡结构有两种形式:两缸结构和三缸结构。三缸结构的滑阀真空泵的平衡则依靠自身结构的力的相互抵消,事实上也并不能完全消除不平衡力,而且结构固定导致很难再进行优化降低振动,而双缸结构的平衡一般由配置平衡轮以及在内部配置配重块加以解决。单级滑阀式真空泵运动状况已经较为复杂,对于双级滑阀真空泵的运动平衡研究更需建立精确数学模型,通过模型定量研究滑阀泵各运动部件的动力学响应以及其对泵体的激振作用,达到减振降噪的目的。传统的滑阀真空泵的振动受力分析采用的是理论力学相关理论,是以滑阀泵主要构件的位置、速度和加速度的微分关系以及矢量合成原理为基础进行分析的。对于较简单的系统,手工推导便可得到较简单的微分方程组。然而,对于双级滑阀泵,不管是两缸结构或三缸结构,以及将来有可能出现的多缸结构,要对其愈加复杂的构型推导动力学方程有相当的困难,并且容易出错。
滑阀转子变形忽略并考虑到滑阀泵运动系统各部件的高速运动与构件本身振动的耦合,冲击、油锤等现象的出现,因此利用计算多体系统动力学完成双级滑阀泵的复杂机构的数学模型,进行相关计算公式的推导以得到双级滑阀真空泵的运动学规律和动力学响应,据此进行动平衡的计算分析以降低振动。
1、滑阀泵多刚体系统运动分析
计算多刚体系统动力学中的运动学分析是以系统中连接物体与物体的运动副为出发点,基于与运动副对应的约束方程进行位置、速度和加速度的分析。
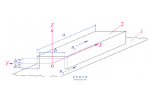
滑阀泵可简化为如图1的曲柄摇块机构。机构由2个刚性构件组成,刚体B1为偏心轮,刚体B2为滑阀。单级滑阀泵系统广义坐标个数为n=3×2=6。

图1 滑阀泵简化机构运动图
从以上数据可以看出:
(1)平衡后滑阀泵支座反力幅值最大值由11948N降到了4815N,降低了约三分之二,平衡效果显著。
(2)平衡前滑阀泵的振动位移幅度较大,x、y、z三个方向的振动位移最大值为4.2mm,最小值也有1.2mm。而平衡后位移值大幅降低,x、y、z三个方向的振动位移平均值控制在1mm范围内,y、z方向的最大值仅为0.37mm,x方向的振动位移偏大,但是也只有1.1mm,是很理想的结果。同时,将研制的2H-150滑阀泵进行了振动实验测试,测试采用丹麦B&K公司4507型振动加速度计。表1给出了实验和理论计算的振动数据比较结果。
表1 振动数据比较表

5、结论
(1)计算结果表明,滑阀泵的泵体质量和体积会影响多刚体系统的质心分布,所以对泵的振动、平衡影响分析时应考虑泵体的质量和体积。
(2)在对滑阀泵进行动态响应分析时,滑阀导轨惯性力、泵体垂直方向零部件的质量力对计算泵体支座反力有影响,它们对振动平衡的作用不可忽视。
(3)从平衡的效果上看,平衡后的滑阀泵振动性能有较大改善,计算结果表明振动力和振动位移幅值大大降低,实验结果则是滑阀泵实验样机在不加地脚螺栓固定的情况下也不会有爬行和爬动现象,振动明显减小,滑阀泵运转平稳。
(4)利用计算多体系统动力学建立的双级滑阀泵的复杂机构的数学模型,计算结果准确可靠,与实验获得的数据吻合,误差在很小的范围内。该方法经理论计算便可获得滑阀泵的振动位移值,从而可省略振动测试实验步骤,节约人力物力。
综上所述,计算多体系统动力学是一种非常有效的计算方法,利用计算多体系统动力学对双级滑阀真空泵的振动平衡进行完整的、系统的动力学分析,可以得到准确的动力学响应,从而达到减振的目的。同时,计算多体系统动力学也可以用于其它机械真空泵的动力分析中,对提高真空泵性能、优化结构将会起到重要的指导作用。