防止罗茨泵过载的措施
2020-05-03 真空技术网 真空技术网整理
罗茨泵压缩气体所需的功率与压差成正比,一旦气体压差过高,泵就可能出现过载现象,造成电机绕组烧损。
解决泵过载问题的方法主要有以下几种:
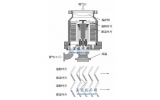
1、采用机械式自动调压旁通阀
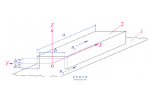
旁通阀安装在罗茨泵的出口和入口之间的旁通管路上,如图 19 所示。此阀控制泵出入口之间的压差不超过额定值。当压差达到额定值时,阀门靠压差作用自动打开,使罗茨泵出口和入口相通,使出入口之间的压差迅速降低,这时罗茨泵在几乎无压差的负荷下工作。
当压差低于额定值时,阀自动关闭,气体通过罗茨泵内由前级泵抽走。带有旁通溢流阀的罗茨泵可以与前级泵同时启动,使机组操作简单方便。
2、 采用液力联轴器
采用液力联轴器也能防止泵的过载现象发生,使泵可以在高压差下工作。液力联轴器安装在泵和电动机之间。在正常工作状态下,液力联轴器由电动机端向泵传递额定力矩。罗茨泵的最大压差由液力联轴器所传递的最大转矩来决定,而液力联轴器可传递的最大转矩由其中的液体量来调节。
当泵在高压差下工作或与前级泵同时启动时,在液体联轴器内部产生了转速差即滑动,只传递一定的力矩,使泵减速工作。随着抽气的进行,气体负荷减小,罗茨泵逐渐加速至额定转速。
3、采用真空电气元件控制泵入口压力
在罗茨泵的入口管路处安置真空膜盒继电器或电接点真空压力表等压力敏感元件。真空系统启动后,当罗茨泵入口处压力低于给定值 ( 泵允许启动压力 ) 时,压力敏感元件发出信号,经电气控制系统开启罗茨泵 ( 如真空系统中装有罗茨泵旁通管路,则同时关闭旁通管路阀门 ) 。
若泵入口压力高于规定值时,则自动关闭罗茨泵 ( 或同时打开泵旁通管路阀门 ) ,从而保证了罗茨泵的可靠运转。
与“罗茨真空泵”相关的主题: