螺杆真空泵双头对称等螺距转子型线研究
结合现有特殊爪型转子型线与单头螺杆转子型线特征,提出了一种双头对称爪型等螺距螺杆真空泵转子型线。通过理论推导得到了该型线完整的端面方程,导出了该型线的面积利用系数和抽速的公式,列出了这种型线的特点。使用Solidworks三维软件绘制出了这种转子的三维实体模型,模拟拟合验证了端面型线的正确性。分析得到螺杆转子端面型线关于中心对称且两转子完全相同,与特殊爪型转子型线相比易加工、节省工时,与单头螺杆转子相比具有较好的动平衡性,可为国内外从事真空泵设计和研发人员提供参考。
干式真空泵属于容积式泵,其工作循环可分吸气、压缩和排气三个过程。真空泵的核心元件是用作抽气作用的一对相互啮合的转子,而转子的端面型线设计是关键技术,不同的端面型线直接决定了真空泵的极限真空度、抽速、容积效率、振动等参数的技术性能。近年来,已经出现了一种高真空直排大气干式泵,只需一台真空泵就可以实现从高真空到大气的全部抽气过程,并实现了商业化,已应用于实际生产中。螺杆式真空泵是20 世纪90 年代出现的一种比较理想的干泵,它具有较大的应用前景和发展潜力,在真空泵市场中占有很重要的地位。干式螺杆真空泵利用一对螺杆在泵壳中作同步高速反向旋转而产生吸气和排气原理,其主要优点是结构紧凑、无需润滑、抽速大、真空度高、极限压力高等,可适应恶劣工况,具有抽取可凝性、含颗粒物气体的能力,主要应用于清洁的真空工艺过程,特别适应于电子、化工、医药等领域。
特殊爪型真空泵的一对转子的形状不相同,转子是双头的,如图1 所示,因此具有较好的动平衡性。但由于转子型线组成的多样性,两个共轭转子的型线不相同,相比两个相同共轭转子的加工工序更加繁琐。同时,共轭曲线的计算求解较复杂,给设计工作带来诸多不便,真空技术网(http://www.chvacuum.com/)认为影响了其推广应用和工作性能的提高。
双头特殊爪型转子具有动平衡性能好等独特优点,已经有了较广泛的研究与应用。目前,单头螺杆转子螺杆真空泵的技术较为成熟,但针对双头乃至多头螺杆转子真空泵,至今极少见到其理论研究和实际产品的公开报道。因此,结合双头爪型转子和螺杆式转子的优点,提出了一种双头对称爪型等螺距螺杆转子型线。通过分析计算,此型线面积利用率、抽速、加工工艺性等得到了提高。

图1 特殊爪型转子型线
1、双头对称爪型螺杆转子型线
真空泵转子的理论型线是一对相互啮合的型线,为保证螺杆真空泵的气密性,实际运转时螺杆转子之间要有安全间隙且要保持定值。留有间隙的转子型线为实际型线。两转子之间的安全啮合间隙即实际型线之间应保持定值,而转子的实际型线是在理论型线的基础上沿啮合点法线方向减去间隙值的一半生成的轮廓线。为了保证二转子不发生干涉,国内的张世伟等学者提出了平移齿面法和内凹齿面法两种解决方法。为了设计计算方便,文中理论型线与实际型线相同,即间隙为零。文中设计的转子是双头的,端面型线是中心对称的,而且这种转子的形状参数相同,称之为双头对称爪型螺杆转子型线。两个螺杆转子参数完全相同,仅旋向相反,便于加工制造。
1.1、端面型线的组成及啮合关系
转子端面型线是转子齿面与转子轴线垂直面的截交线。若令端面型线绕z 轴匀速转动,同时又沿着z 轴做匀速移动,这样端面型线在空间上形成的曲面就是螺杆转子齿面。图2 为双头对称螺杆转子的端面型线轮廓图,其主要参数有齿顶圆半径Rt,齿根圆半径Rr,啮合圆半径r,两转子中心距a。如图2 所示,右侧转子端面轴心为原点,水平方向为x 轴,向右为正方向,y 轴垂直于x 轴,方向向上,建立直角坐标系。
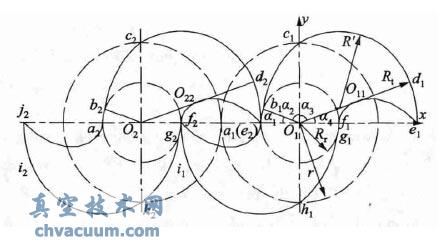
图2 双头对称螺杆转子型线轮廓
2、双头转子型线特点
双头对称爪型等螺距螺杆转子型线是一种新型型线,具有以下特点:
(1) 相啮合的两转子型线参数完全相同,仅旋向相反,且型线为中心对称图形,因此可以大大减少许多设计、加工等方面的工作量。
(2) 该端面型线由摆线、轮廓线和转子内外圆等曲线连续而光滑的连接组成,这种型线与其啮合线不会出现干涉,该型线可以实现完全封,密封线短。这种型线也有泄漏三角形,但级间泄漏较小。
(3) 该螺杆转子是双头对称的,转子在旋转时,其上每个微小质点产生的离心惯性力相互抵消,减少了震动和噪声。因此,其动平衡性能要优于单头螺杆转子。
(4) 该转子的齿形结构相对较简单,除了凹齿面外,其他齿面均为直齿面,便于加工制造。整个转子齿面较难加工的位置是凹齿面部分,它要求要有较高的形状精度和位置精度,从而才能保证泵的抽气性能。
3、三维实体建模
螺杆转子的三维实体较为复杂,为了方便地绘制出实体模型,需要借助螺杆转子的端面型线方程先在Solidworks 绘图软件中画出螺杆转子的端面型线。对于型线中的摆线等非常见的曲线,可在Solidworks 中采用样条曲线的参数曲线功能得到,修剪曲线得到所需要的型线轮廓。将所得型线按照一定的导程旋转扫描生成三维实体,得到单螺杆和双螺杆啮合时的三维模型,可方便地对其性能进行分析研究。生成的单个螺杆转子三维实体模型如图4所示。

图4 螺杆转子三维模型
通过在标准中心距下对其干涉现象进行检查得出并无干涉,添加运动算列分析螺杆啮合转动情况,理论建模条件下发现转子转动良好,无干涉和间隙,且运转较平稳。但还应考虑生产实际中安全运转时转子运转情况,在标准中心距下转子齿面会发生干涉现象,这种干涉是由装配误差造成的。由于这种误差不可避免,两转子间需要留有一定间隙。装配时间隙是可调的,通过调整间隙,实现转子运转不干涉。
4、结论
本文分析了特殊爪型型线和螺杆转子型线的特点,提出了对称爪型螺杆转子型线,列出了完整的端面型线方程和相关参数。该型线是10 段曲线构成的中心对称图形,两转子完全相同仅旋向相反。这种双头对称螺杆转子相比单头螺杆转子具有良好的动平衡性,型线的设计、加工便利性要优于以往爪型型线,加工制造相对容易,比较适合目前我国的制造加工业水平。
此型线是一种新型型线,本文只对其端面方程、面积利用系数、抽速等作了介绍。进一步的研究如螺杆转子涂层防腐蚀技术、工作过程中如何降低转子工作温度、增强工作平稳性以减少噪音、如何更好地防止漏气减小泄露通道面积、加工方法及刀具设计等问题也亟待我们解决,从而全面提高干泵的综合性能。






