基于C8051F340的智能型电动执行机构控制系统设计
为解决传统电动执行机构在工业生产现场的不足,提出基于C8051F340的智能型电动执行机构控制系统的设计方法。智能型控制系统通过采用友好的人机交互界面,具备故障自诊断与报警功能,使调试操作与故障排查更简单方便。在硬件上,通过采用功率驱动控制信号互锁电路,实现硬件互锁功能,避免触发信号同时有效导致控制回路紊乱,提高了智能型电动执行机构的可靠性。行程位置控制省去了复杂的机械行程,采用无接触式磁旋转绝对编码器,优化了机械结构,提高了行程分辨率精度,分辨率可达到0.08790。通过对硬件电路和软件程序的优化控制,C8051F340单片机的合理利用,实现了阀门电动执行机构控制系统的智能化、合理化和高可靠性的要求。
1、控制系统设计原理
智能型电动执行机构控制系统采用C8051F340作为主控制单元。C8051F340是完全集成的混合信号片上系统型单片机,具有SiliconLabs专利CIP-51微控制器内核,具有标准8052的所有外设部件,包括4个16位计数器/定时器、2个具有扩展波特率配置的全双工UART、1个增强型SPI端口、1个SMBUS端口、40个I/O引脚,具有5个捕捉/比较模块和看门狗定时器功能的可编程计数器/定时器阵列(PCA)、4352字节的内部RAM、128字节特殊功能寄存器等。C8051F340片上丰富的硬件资源,使其适用于智能型电动执行机构控制系统。
智能型电动执行机构控制系统采用非侵入式结构设计,技术先进,结构简单,可靠性高。操作方式为磁感应操作,在就地状态下,可以通过操作面板按钮或手持式红外遥控器控制电动执行机构的开、关、停操作及参数设置、浏览等操作,在远程状态下,可通过开关量信号或4~20mA电流信号实现电动执行机构的开、关、停等操作。系统具有强大的故障自诊断功能和故障报警功能,并可记录设备运行状态。智能型控制系统由电源模块、功率驱动模块、人机界面模块、行程检测模块、开关量信号输入输出模块、模拟量信号输入输出模块组成,采用C8051F340作为主控制芯片,通过对各硬件模块的输入输出操作,实现对阀门电动执行机构的各项控制功能,其系统设计原理框图如图1所示。
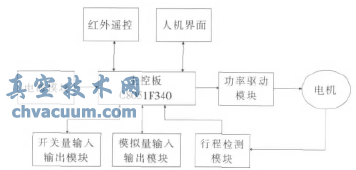
图1 控制系统原理框图
2、控制系统的硬件设计
智能型电动执行机构控制系统硬件电路由电源板、主控板、操作面板三部分组成。主控板与操作面板通过UART口串行通信,实现人机对话,主控板接收外部指令控制功率驱动模块,操作电机正反转运行,实现阀门的开启和关闭,并及时输出开关量反馈信号或模拟量反馈信号。
2.1、电源模块
电源板为主控板提供两路直流电压信号,一路为+24V(1±1%),一路为+5V(1±1%)。+24V电压信号作为6路开关量和模拟量输入输出信号及功率驱动模块电路电源,输出电路如图2所示。+5V电压信号作为主控板C8051F340单片机及其他相关硬件电路电源,输出电路如图3所示。
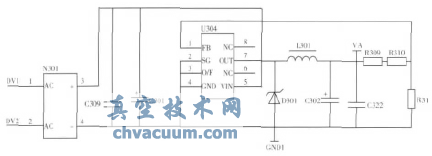
图2 +24V电源输出电路
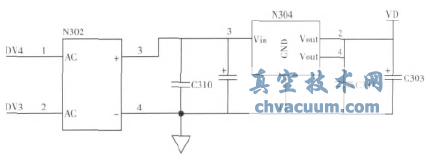
图3 +5V电源输出电路
2.2、功率驱动硬件电路
功率驱动信号控制电路如图4所示。功率驱动信号控制电路实现硬件互锁功能,避免触发信号同时有效导致控制回路紊乱。利用C8051F340单片机3路IO口作为功率驱动电路触发信号,一路IO口作为触发信号输出端电源控制信号,另两路作为触发控制信号,进一步提高了触发信号可靠性。IO口配置为推挽方式,低电平有效。电动执行机构在工业现场使用过程中,由于现场运行有其他设备,包括各种仪表、传感器及变频器,会引入信号干扰以及各种危险的强电压信号,为了保证电动执行机构控制系统的安全性与可靠性,采用光耦TLP521-4对触发信号进行信号隔离,避免触发信号干扰,保证电动执行机构可靠、稳定运行。
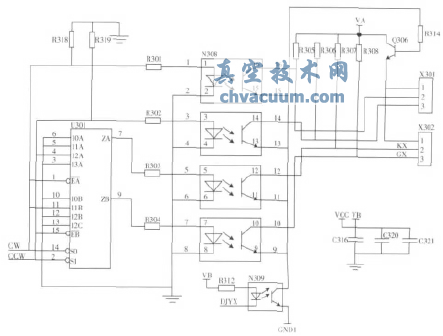
图4 功率驱动信号控制电路
2.3、行程检测硬件电路
行程检测电路采用无接触式磁旋转编码器,可以准确测量整个360°范围内的角度,其分辨率可以达到0.0879°。编码器通过输入齿轮,与阀门电动执行机构的行程传动部件啮合,使之具有高精度位置检测功能。编码器具有内部稳压器,在主控板+3.3V电源电压下工作,主控板通过串口操作,以串行比特流的形式读出行程数据,实现阀位数据的读取。
2.4、模拟量信号硬件电路
智能型电动执行机构控制系统4~20mA模拟量输出利用C8051F340单片机的PWM输出功能。C8051F340具有5个捕捉/比较模块和看门狗定时器功能的可编程计数器/定时器阵列(PCA),在智能型控制系统里将PCA配置为16位脉宽调制器方式。在该方式下,16位捕捉/比较模块定义PWM信号低电平时间的PCA时钟数,配置PCA相关寄存器,可以输出占空比可变的PWM波。PWM输出电路采用光耦N101进行信号隔离,在不影响光耦N101开关速率的条件下,PWM波频率设置为200Hz。智能型控制系统采集行程检测信号,计算当前阀位值,然后输出不同频率的PWM波,在光耦输出端,通过RC积分电路将PWM波转换成电压信号,通过恒流源硬件电路,输出4~20mA电流信号,实现阀位模拟量信号反馈功能。模拟量反馈信号输出电路如图5所示。
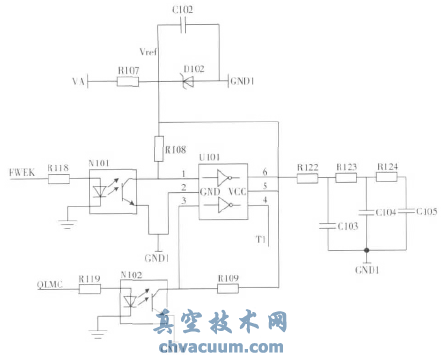
图5 模拟量反馈信号输出电路
2.5、开关量信号输入硬件电路
智能型电动执行机构控制系统在远程状态时,通过开关量信号输入硬件电路,接收开、关、停指令信号,控制电动执行机构完成相关动作。为避免外部信号干扰,通过光耦N109、N110、N111进行信号隔离,隔离后的开关量信号接入C8051F340单片机IO口,IO口配置为弱上拉、开漏方式,在软件控制方式中采用“去抖”处理方式,能准确、及时采集开关量输入信号,有效避免误操作,提高电动执行机构运行的可靠性。采用二极管VD111,有效避免接线错误带来的影响。开关量信号输入电路如图6所示。
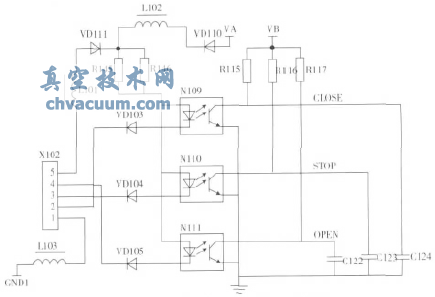
图6 开关量信号输入电路
3、控制系统的软件设计
智能型电动执行机构控制系统主程序流程框图如图7所示。
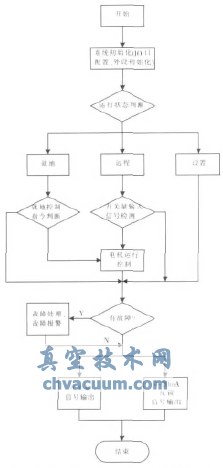
图7 主程序流程框图
4、运行效果
通过合理设计,智能型电动执行机构控制系统运行可靠性大大提升,通过了EMC电磁兼容实验二级实验要求。





