电动执行机构角度测量方法的改进
按照JB/T8219-1999要求进行角行程电动执行机构的测试中,多个指标与实测输出轴行程有关。用全圆仪来测量有一定的局限性,一些情况下是不能满足测试要求的。运用编码器在精密定位、速度、长度、加速度、振动等方面得到广泛的应用,且具有结构简单、计量精度高、寿命长等优点,完全可以设计出满足测试要求的方案。
1、改进的依据及改进方法
按JB/T8219-1999《工业过程测量和控制系统用电动执行机构》标准中的5.2.4条款中对试验用仪器的精度要求是“其基本误差应小于或等于被测量产品基本误差限的1/3,其量程范围与被测值的范围相适应。”
本标准的5.4.1比例式执行机构的基本误差计算公式:
δ:基本误差;L1:输出轴行程实测值(°);L0:输出轴行程约定真值(°);L:输出轴额定行程(°)。
本标准的4.2.1基本误差要求1级的误差是±1%。
执行器额定角行程值有50°、70°、90°120°、270°这5种。下面计算这5种额定角行程的允许最大值误差。
设:L0:=0°;L=分别代入50°、70°、90°120°、270°;δ=1%代入(1)式,解方程求出L1的允许最大值解得:L1=0.5°、0.7°、0.9°、1.2°、2.7°
按测量仪器的精度应为被测量产品基本误差限的1/3,得到测量仪器的精度为0.17°、0.23°、0.30°、0.40°、0.90°。
另外全圆仪安装在执行机构的输出轴上会有安装偏心现象。安装偏心就是指全圆仪的圆心与输出轴的轴心不重合,如图一所示。设全圆仪半径为R,O为全圆仪的圆心,O'为输出轴的轴心,O与O'之间的距离为d,假设起始点(零位)在X轴上,当输出轴转动角度为α’时,全圆仪相对输出轴转动的角度为α。由图得出几何关系式:
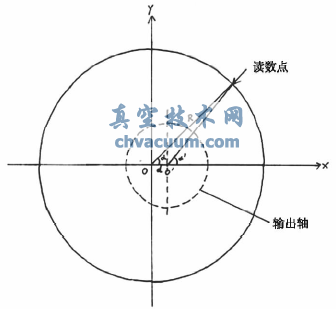
图1 安装偏心示意图
△α=α'-α即为输出轴和全圆仪转角的误差值,把式(1)代入tg△α=tg(α'-α)并整理得到:
对式(2)的两边求导得:
当式(3)等于0时,式(2)取最大值即:Rdcosα-d2=0得出
把式(4)代入式(2)得:
所以△αmax=d/R。所用全圆仪半径R已知为100mm,当d=1mm时,△αmax≈0.6°,这样误差就比较大了。再加上读数时人的视差,用全圆仪来测量就比较粗糙了。
2、编码器的种类及选择
根据检测原理,编码器可分为光学式、磁式、感应式和电容式。根据其刻度方法及信号输出形式,分为增量式编码器和绝对式编码器。
在电动执行机构的测试试验中,要求电动执行机构经受环境温度-25℃~70℃;机械振动频率10~150Hz,位移幅值0.15mm,加速度幅值20m/s2等严酷条件,对于编码器的选用,必须同样能够经受住同样的条件,并且测量精度不受其影响。
多种编码器都可满足上述要求,综合考虑成本因素,选用了磁编码器。磁编码器和其他类型编码器相比,具有高频特性好,响应速度快;无接触位置传感可以完美应用于气温变化大等恶劣环境下;耗电少、使用寿命长;结构简单、抗冲击力强,可靠性高。

图2 常用磁编码器
图3 联轴器
采用目前较为常用的AS5040芯片磁编码器来设计所需测试系统。首先,通过联轴器把输出轴和磁编码器联接,磁编码器所输出的脉冲通过采集卡采集,再通过如Labview虚拟仪器程序的处理并把测量结果显示出来。
3、结语
通过上述改进,在电动执行机构的测试中遇到的问题就得以解决,尤其是在振动状态下的测量有了可靠的保证,满足了标准的要求。





