电动阀门智能控制器的设计
以AT80C2051作为微控制器设计电动阀门智能控制器,完成了电动阀门的位置检测、远程控制信号转换、参数整定与灵敏度调整、阀门电机驱动电路及键盘、显示等硬件电路设计,在建立数学模型的基础上,设计并验证了系统的PID算法,完成了电路中相应的软件程序设计,实现了对电动阀门执行机构进行实时控制,保证了操作的可靠性与精确性。运用RS-485实现与远程控制中心间的通讯,在组态环境下进行实时监控运行,实现仪表控制的数字化、智能化、网络化与远程化,便利了操作,拓宽了阀门的使用环境范围,节约了成本。组态实验调试的结果表明:该装置线性关系较好,动作时间短,具有较高的精度与友好的人机界面,误差在0.3%以内。
在现代工业自动控制中,调节阀是最主要的执行器件之一,在石油、化工、电力、水利等行业发挥着重要的作用。但国内电动调节阀技术与国外相比还有很大差距,国内电动调节阀普遍具有结构不合理,控制精度低,安全性能差,不能很好地进行人机通话、难于现场标定和维修等缺陷。随着电子技术、控制技术及通讯技术的发展,国内阀门厂家纷纷对电动调节阀进行研究,各项指标和性能都有所提高,但是相应的成本也提高不少,价格比较昂贵的。为此研究一款价格实惠、结构简单、功能齐全、便于现场操作和集中控制的电动调节阀。
1、硬件结构
1.1、总体结构
系统的硬件电路主要由阀门的位置反馈信号检测、远端控制信号的转换和现场参数整定与灵敏度调整电路所构成的模拟量输入通道、A/D转换、伺服电机驱动及减速运行的输出电路、D/A转换和外围键盘显示等电路以及上位机远程通讯等组成,如图1所示。控制中心信号、现场实际开度的反馈信号、现场参数整定和灵敏度信号调整通过TL2543进行A/D转换后送到AT89C2051微控制器,微控制器根据这些信号进行运算处理,以控制电动阀门执行机构的正反运转和全开全关运行,使得阀门快速达到设定开度。采用LCD实时显示阀门实际开度值,通过RS-485通讯直接将阀门现场反馈信号传输到监控中心的上位机,在上位机的组态界面上进行显示,以记录阀门开度的调节情况。同时中控中心的工作人员可以通过组态监控,对现场阀门实际开度进行设定,信号通过RS-485直接送回给控制器进行操作。在电动阀门出现故障时,现场可以及时地做出报警,同时控制中心组态监控也会发出报警,以采取相应的保护措施。通过D/A将阀的开度转换为4~20mA的电流信号,传输给远程控制中心的模拟量采集模块,以进行远程操作与显示。
1.2、输入通道电路设计
输入通道主要由阀门位置检测信号、远端控制中心信号、现场参数整定与灵敏度调整电路与A/D转换电路组成。
用安装在阀门电动机执行机构上的位置变送器来检测实际开度反馈信号,位置变送器是高性能的导电塑料精密旋转电位器,具有较高分辨力的、高性能的经济类型产品。电位器旋转角度和阀门开度有线性关系,旋转电位器将阀门开度情况转换成对应的角度信号,进而转换成系统所接收1~5V的DC电压信号,因此可以依据电压和角度的线性关系得到相应的位置信号。阀门实际开度反馈信号阀门实际开度经过位置检测机构转换成相应的电压信号MA2,经过射级跟随器进行阻抗处理变化之后的信号送到A/D转换芯片TL2543的IN1口。电路如图2所示,其中VD3、VD45起到钳位作用。

图1 系统结构图

图2 控制端信号转换电路图
工业生产中传送的标准的电信号可能是4~20mA的直流电流,也可能是1~5V的直流电压,控制中心的信号为4~20mA的电流信号,当来自控制中心的信号MA1经过图3所示的信号转换电路时,预先应当将MK2闭合,此时电流输入信号经电阻R2、GND形成回路,4~20mA的电流信号经过转换电阻R2流向地,此时的输入电流信号就被转换成1~5V的电压信号,即A/D转化器TL2543的IN0口的电位。亦即信号的最小值4mA或1V对应精密电位器的最小值,也相当于阀门的起点位置。信号最大值20mA或5V对应精密电位器的最大值,也相当于阀门满度位置。

图3 位置采集信号转化电路
为使阀门执行器能够适应工业生产中不同型号与口径阀门,满足各种的阀门装置具有不同的初始位置和满度位置,提高系统的灵敏度,增强通用性,做到测量的精确性,采用3个滑动电阻RP1、RP2、RP3构成调零、调满和调灵敏度电路,使阀门电动执行机构的零点和最大角位移都在一定范围内可调,减小误差。调零(ZERO)、调满(SPAN)、灵敏度(PROP)电路如图4所示。IN2、IN3、IN4端的电压就为传输到A/D转换TL2543的调满、调零和灵敏度信号。阀门在运行之前要将这些信号进行A/D转换反馈到为微控制器中进行处理,来控制电动执行机构下一步的转向。

图4 零点、满量程、灵敏度调整电路
1.3、阀门电机驱动电路设计
微控制器将转换之后的控制信号、阀门实际开度反馈信号、灵敏度信号等进行相应的运算,判断阀门执行机构该向哪个方向运行,从而向对应的I/O口送出相应的TTL触发信号,信号经过2个或门互锁正反转触发和转换电路与固态继电器的触发控制电路转换成可以驱动伺服电机运动的交流控制电平,图5中单片机控制器发出2个TTL触发信号,运用与非门的功能,将电机的正转、反转、停用工作状态用P3.2、P3.3电平状态来控制,P3.2、P3.3的TTL触发信号经过与非门传输到固态继电器38D05的DC-上,为防止两个触发器信号同时为低电平导通,在固态继电器的DC+处分别接上拉电阻,已在初始化的时候把触发信号拉成高电平,避免误导通,从而达到阀门的正反、停止控制。同时电路中接入极限位置行程开关,当阀门运转至极限位置,电机停止运转,起到保护的作用。为了准确及时平稳控制阀门的位置,在伺服电机驱动增加减速器,减速器采用谐波齿轮传动,把伺服电机高速转矩、小力矩的输出功率转换成执行机构输出轴的低转速、大力矩的输出功率,以推动调节结构,使阀门运行平缓、承载能力强、传动精度高。

图5 阀门电机驱动电路
2、系统控制算法与仿真
2.1、系统建模
阀门控制属于典型的位置随动控制系统,由位置检测机构检测到的信号与实际信号相比较产生误差信号,经过控制器进行A/D转换后进行PID运算,参数调整等输出电压与测速发电机反馈电压形成的误差电压作为伺服电机驱动电压,通过减速器后输出实际角度。控制系统结构框图如图6所示。

图6 阀门控制系统结构图
伺服电机部分的传递函数可以表示为:
式中:电机增益kt=2;Ra=6Ω;La=12mH;转动惯量J=0.006kg·m2;Ce=Cm=0.3N·m/A;黏性摩擦系数f=0.2N·m/s;减速比i=0.1。减速器部分可以看出以纯积分环节。
2.2、PID控制与仿真
采用PID控制算法,通过临界比例度法与凑试法整定PID控制器的参数,得到Kp=10,Ti=0.01,Td=0.5,其正弦输入下跟随曲线如图7所示。

图7 电动阀门跟随曲线
从图7可以看出输入输出曲线基本一致,跟随特性好,调节速度快,能够满足设计要求。
3、系统软件设计
开机初始化,由上电复位后的主程序执行,用来初始化系统的硬件资源和软件资源,对串行口、定时器、内部寄存器初始化;完成开机电信号故障检测,如果有电信号故障则亮红灯报警,没有故障则进行键盘扫描,判断是否有强制执行设置,有则执行相应动作,没有则采集检测的位置信号,与设定值和控制中心命令值比较,以调整参数,开启A/D转换并数字滤波,经过PID运算后,驱动阀门动作,控制电机转动的方向与角度,并显示相应阀门实际开度。同时向上位机实时提供实际开度数据信息,显示阀门开度,故障报警等。
4、试验调试
远程监控中心PC采用组态进行程序设计,通过PC的串行接口传输和接收数据,在该界面中预设阀门的开度以及实时开度显示,历史数据报表的查阅。
表1为从组态界面上读取的电动阀预设开度和实际开度之间的实时数据。
从表1中可以看出阀门实际开度值与预设开度值基本一致,最大误差仅0.25%,符合设计要求达到的精度。
组态运行下阀门开度值K与相应出口流量Q间测得的数据报表如表2所示。
表1 预设开度与实际开度对比
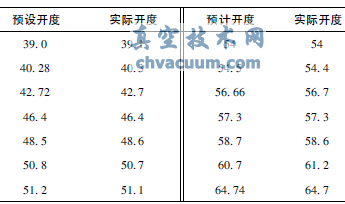
表2 系统历史数据报表

对以上数据利用MATLAB进行多项式拟合,拟合曲线如图8所示。

图8 阀门输出曲线
从图8中可以看出出口流量和阀门开度成正比的线性关系,其关系式为:Q=0.0983K-1.8621,线性关系理想。
由图表分析可知,在相同变化行程情况下,阀门开度较小时,相对流量变化值小,比较缓和;阀门开度较大时,控制灵敏有效。所以在实际中用控制阀门开度来控制流量大小。
5、结束语
以单片微机为控制器设计了电动阀门控制器,能够接收控制中心命令信号和键盘控制命令,根据阀门实际反馈信号实现正转、反转、停转的闭环控制;能够根据实际运行状况做出判断,进行故障报告、应急处理、显示等工作;具备远程通信功能,能够在组态环境下进行监控运行,实现仪表控制的数字化,智能化、网络化与远程化,拓宽了电动阀门的使用环境的范围,节约了成本。实验调试的结果表明:该装置线性关系较好,动作时间断,误差在0.3%以内,具有较高的精度。