智能电动执行器及其变频控制技术综述
随着电力电子技术、微机控制技术、微电子技术等现代科学的发展,智能电动执行器及其控制技术成为了现代电动执行机构的发展方向。本文首先结合相关产品的应用情况介绍了智能电动执行器国内外现状;其次简单介绍了智能电动执行器的组成及基本工作原理;然后介绍了变频调速控制技术中采用的几种PWM控制技术;最后对智能电动执行器及其控制技术的发展趋势进行展望。
工业生产过程自动调节系统一般由检测器、调节器、执行器和调节对象组成,其中执行器是不可缺少的重要组成部分,作为工业过程控制系统中终端产品,其在自动控制系统中发挥着其他产品不可替代的作用。随着经济的飞速发展,自动化程度的提高,执行器应用范围的越来越广泛,已经从最初的石油、化工、冶金、电站等领域发展到食品、制药、能源、供水、环保等自动控制领域。国家对执行器的需求不仅数量上巨大,而且品种、规格要求也越来越高,这对执行器的性能、适用范围提出了更高的要求[1,2],伴随着微电子技术、电力电子技术、微机控制技术以及通信技术等现代科学的发展,国内外相关企业和研究机构长期对执行机构的跟进研究,逐渐形成了以多功能、智能化、远程控制、故障自诊断等技术为主要特点的智能型电动执行器。
1、我国执行器发展现状
我国从20世纪50年代末开始仿制前苏联、西德的气动调节阀开始,经过20世纪60年代中期的行业调整,逐渐形成了我国自己的气动调节阀系列产品;20世纪70年代初,逐渐开发了DDZ-II、DDZ-III型电动执行器[3];20世纪80年代以来,随着电力电子技术的发展,无触点DKJ型角行程和DKZ型直行程电动执行机构进入市场,这也是我国最早的、唯一生产的电动执行器[4];20世纪90年代初,仪器仪表行业组织了DDZ-S仪表与执行机构的联合开发,初步实现了控制仪表和过程控制的数字化技术。由于我国工业技术基础薄弱,水平相对偏低,在工业生产过程中的自动化程度比较低,所以对控制仪器仪表的要求普遍不高,这就客观上致使一些厂家不在这个方向上投资,再加上国家在建国后一段时间内没有认识到发展执行机构的重要意义。综合这些原因,我国执行机构的发展速度远远落后于其他控制仪表。改革开放以来,执行器发展速度加快了很多,但是技术的进步在客观上是有个过程的,只有相关的技术都取得进步才能促使执行器更快的发展,近些年来一些厂家为了片面追求效益,只引进国外产品组装,相对的技术消化和技术人才的梯队培养没有跟上,致使国内的相关技术相比国外先进技术落后十几年的时间。
目前,国内有几十家执行器厂商,但是在控制精度、智能化水平和安全性能等方面处于较低的水平,其中相对规模较大的厂家有天津仪表七厂、上海仪表十一厂、重庆川仪十厂和四厂、大连第三仪表厂、扬州电力修造厂、鞍山热工仪表厂等,其中天津仪表七厂和重庆川仪十厂是电动执行器的专业厂商,能够提供多个规格的电动执行器,但是相比国外,品种规格还是相对单一,没有形成系列化,另外在防爆、核级产品和特殊环境的产品上基本上还是全部需要从国外进口。
相对普通电动执行器,智能型具有变频功能的执行器相对国外差距更大。在国内,将变频技术应用在执行器上的厂商中,重庆川仪十厂的技术代表了国内在此行业的先进水平。该厂正在研发的智能型具有变频控制技术的电动执行器,能够实现双向力矩、速度的独立、宽范围调节,特别是在S9工作制式下实现力平衡的动态定位技术,可以显著提高交流电机的定位精度和响应速度。
2、国外执行器发展现状
相比国内执行器行业的技术落后,国外相关行业在数字化、智能化、网络化、机电一体化等方面处于领先水平。在应用领域的宽广程度上,技术储备深度上,产品规格型号等方面都是国内所无法望其项背的。
目前,国外在智能型变频执行器方面,德国SIPOS、法国BERNARD、英国ROTORK、美国VALTEK型智能执行器生产厂商基本代表了该领域的世界先进水平。主要表现在以下几个特点[5,6]:
2.1、智能控制。
智能变频控制技术是智能电动执行器变频技术的核心,国外先进的执行器都采用智能控制技术,例如VALTEK公司的Starpac智能化阀门电动装置能响应外部4~20mA模拟信号,然后由RS-485通信口发来的数字信号按自身程序设定的参数进行PID控制[7]。
2.2、自我保护功能。
完善的自我诊断功能和自我保护功能可以减轻技术人员的工作量,提高产品使用寿命。以SIPOS5FLASH系列智能执行器为例,将变频装置和控制器独特的结合在一起,可以在电机行程进入末端的时候采用比较低的速度。这样,由于电机和齿轮的动能降低,减少了冲击,从而避免了过力矩,同时也避免了惯性对阀门的冲撞。
2.3、丰富的在线显示功能及通讯功能。
几乎每个先进的智能产品都采用了LCD显示,有些产品同时也加上了LED发光指示。通讯功能可以使操作者和研发人员很方便控制机器,如SIPOS5FLASH系列,可以方便的选择就地和远程操作,可以通过RS232C串口、现场总线等方式对参数设置和调试。
2.4、完善的智能自我诊断功能。
智能执行器可以智能判断产品故障,通过LCD现实或者通过LED发光报警,非常方便维修人员,降低了工作量。
2.5、变频调速技术。
采用了变频调速技术,在定位精度及稳定性、柔性调节控制、宽范围调节、输出转矩和转速、减少备件的种类和数量等方面显示了优越的性能。
2.6、模块化设计加一体化结构设计。
采用一体化结构设计使得整个系统的设计、安装、操作、维护等方面大大简化。而采用了模块化设计可以更方便设备的调试和拆换,为用户提供了最大的方便,节省了因部分坏掉而全部设备的更换带来的额外费用开支。
3、智能电动执行器的组成及基本工作原理
传统的电动执行器功能相对简单,采用伺服放大器和执行机构就可以完成基本的功能设计,但是智能型电动执行器要完成人机交互、智能控制、通讯等一些相对比较复杂的功能,这就要求在传统电动执行器的基础上增加一些新的模块来支撑这些功能。智能电动执行器的结构示意图如图1所示。
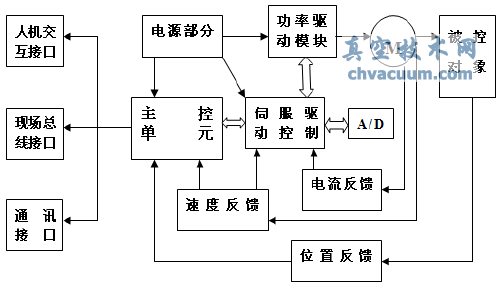
图1 智能电动执行器结构示意图
由图1可知,智能执行器的基本功能模块主要由主控单元、接口模块、电源模块、功率驱动模块、伺服驱动控制模块、检测反馈模块组成。智能电动执行器主控单元通过接受CAN总线传送的上位机命令并结合所要调控的对象(如阀门)的检测传感器反馈回来的信号,主控CPU据此计算所需的速度控制信号,然后将该信号传送至伺服驱动控制模块,功率驱动模块驱动电机转动,使被控对象(阀门)的开度在理想的时间内达到一个合理的位置。智能电动执行器利用了现场总线通信技术将伺服放大器和功率驱动模块紧密联系起来,实现了主控单元和执行机构的双向通讯、在线标定、自我诊断、保护等多种功能,很大程度上提高了控制精度和设备运行的安全性[8,9]。
4、智能执行器的变频控制策略
交流电动机变频调速是在现代微电子技术基础上发展起来的新技术,其调速性能比传统的直流电机调速更优越,比调压调速、变极调速、串级调速等交流电机调速方式具有调速平滑、调速范围更宽、效率高、结构简单、运行安全可靠等优势。变频技术在智能执行器中的应用,在定位精度及稳定性、柔性调节控制、宽范围调节、输出转矩和转速、减少备件的种类和数量等方面进一步提高了执行器的性能和适用性[10,11]。
由于PWM技术可以在实现变频变压的同时可以抑制谐波的特点,其在交流传动领域得到了广泛应用。智能电动执行器的执行机构一般采用交流电机,基于PWM控制技术在电机变频调速中的优异表现,故采用PWM控制技术也就成为了智能执行器变频控制技术的核心。
基于相电压控制的SPWM法是目前应用较为广泛、技术比较成熟的PWM控制技术。这种控制技术要求的电路结构简单、成本低,能够满足一般传动的平滑调速要求,但是在低频阶段,动态转矩能力和静态调速性能都不好,系统性能不高、稳定性差。
电压空间矢量(SVPWM)控制方式是一次生成三相调制波形,以内切多边形逼近圆的方式进行控制的。在后来的实际使用过程中,人们又引入了频率补偿技术,可以减弱速度控制的误差。但是这种控制方式的控制电路环节较多并且没有引入转矩调节,所以采用这种控制方式的系统并没有从根本上得到改善[12]。
针对以上控制方式在性能上的不足,提出了矢量控制变频调速方法。这种控制方法的主要思想是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理对励磁电流和转矩电流分别进行控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,从而达到控制转矩的目的。但是,在实际的应用过程中,由于转子磁链不容易准确观测,电动机的参数对系统特性影响比较大,并且等效为直流电动机后在矢量旋转变换较为复杂,这使得采用该控制方式的实际应用效果很难达到理论分析的理想结果[13]。
1985年,德国鲁尔大学的DePenbrock教授提出了直接转矩控制变频技术。该方法的基本思想是在定子坐标系下分析交流电动机的数学模型,控制电动机的磁链和转矩,省去了在矢量变频控制技术方式里交流电动机等效为直流电动机种的复杂矢量旋转变换计算,也不需要简化交流电机模型,在很大程度上解决了矢量变频控制的不足[14]。
5、发展趋势
任何一种技术的进步都和相关其他技术的进步有着非常紧密的关系,执行机构的发展也离不开微电子技术、电力电子技术、自动控制技术、网络技术、机电一体化技术等技术的进步。伴随这这些相关技术的发展,智能执行机构的发展趋势为:智能变频技术、模块化设计技术、高效变频电机及传动技术、S9工作制、动态力平衡定位技术、故障诊断及保护技术、现场总线技术、抗电磁干扰技术、机电一体化结构、数字控制技术等等[15,16]。
参考文献
[1]赵青梅,贾宝凤,问奴虎.智能电动执行器的应用[J].中国仪器仪表.2004,24(6):41-42.
[2]贺增耀.电动执行器在自控系统中的发展及应用[J].山西建筑.2007,33(5):185-186.
[3]卞正岗.世纪之交话自动化仪表工业[J].自动化博览,2000,(1)6-9.
[4]吴举秀,綦星光.电动执行器的应用现状及发展趋势[J].山东轻工学院学报,2007,21(3):50-52.
[5]C.R.PaulandKB.Hardin.Diagnosisandreductionofconductednoiseemissions.IEEETrans[J].Electromagn.Compat.,1988,30(4):553-460
[6]TingGuo,DanY.ChenandFredC.Lee.SeparetionoftheCommon-ModeandDif-ferential-ModeConductedEMINoise[J].IEEETRANSACTIONSONPOWERELEC-TRONICS,1996,11(3):480-488.
[7]杨新志,唐华.电动执行机构的变频调速控制[J].电机与控制应用,2006.
[8]新一代SIPOS5FLASH系列变频智能型电动执行器机构概述[Z].2008.
[9]杨平,彭道刚,王志萍等.智能电动执行器的特点及应用[J].电子仪器仪表用户,1999,6(2).
[10]黄春英.新型阀门电动执行机构的研究及开发[D].大连理工大学硕士学位论文.2003,1-5.
[11]曹江,张春喜,张志强等.智能变频电动执行机构发展现状及其控制技术综述[J].黑龙江水专学报,2007,34(4):93-96.
[12]韦力,靳坤,王明山.一种新型SVPWM调制方法的研究与实现[J].ElecticalMeasure-ment&Instrumentation,2010,47(4).
[13]余国民,王克难,王大志.基于空间矢量控制的PWM变频器的研究[J].沈阳理工大学学报,2008,27(4).
[14]张爱玲,周赞强,王建华.异步电机直接转矩控制系统SVPWM算法的改进[J].太原理工大学学报,2010,41(3).
[15]麻贵峰,杨国田,白焰.执行器的智能控制初探[J].自动化仪表,2004,25(1).
[16]姜艳华.基于LonWorks现场总线的智能电动执行机构的研究[D].辽宁工程技术大学,2006.