配永磁机构真空断路器动态仿真与实验
为了研究断路器分、合闸过程的动态特性,笔者针对一台配永磁操动机构的真空断路器,基于虚拟样机技术建立了断路器的动力学模型,推导出模型动作过程所满足的运动方程及电磁方程,对真空断路器的分闸、合闸动态过程进行仿真分析与实验对比。仿真和实验结果表明,模型的动态特性满足断路器的技术参数及实验数据的要求,为研究断路器的优化设计和故障诊断提供了依据。
引言
断路器是电力系统中起控制和保护作用的重要设备,其工作性能对电网的可靠运行具有重要的影响。目前在国内,一种电磁操动、永保持的永磁机构已广泛应用于真空断路器领域。与传统操动机构相比,永磁机构具有结构简单、节能和高可靠性等突出优点。然而,永磁机构的动态过程比较复杂,不仅要研究分、合闸过程中运动部件的机械参量变化,还要考虑机构中电磁吸力、线圈电流、系统磁链等参量之间的动态耦合关系。因此,分析永磁机构的动态特性对于研究断路器工作性能和提高电网稳定性具有重要的意义。
虚拟样机技术是基于多体系运动学与动力学建模理论,可进行多领域仿真的综合应用技术。通过在虚拟环境中建立完全参数化的断路器模型,对模型进行动态仿真,可以获得断路器运动部件不同时刻的位置、速度等参量,从而直观、准确的分析断路器的动态特性。文利用虚拟样机动态仿真技术来预测断路器操动机构的故障。文阐述了虚拟样机技术在断路器的动态仿真以及设计领域中的应用。
笔者以一台配单稳态永磁机构的真空断路器为研究对象,采用虚拟样机技术建立了断路器模型,对断路器的分、合闸动态过程进行仿真分析,并对样机进行实验以保证仿真结果的准确性和可信性。
1、断路器模型的建立与运动过程分析
1.1、真空断路器模型的建立
文中的仿真对象为ZW45-12 型户外真空断路器,断路器总体采用三极支柱式结构,开关本体采用的是配永磁机构的真空断路器,断路器的主要技术参数见表1。
表1 断路器的主要技术参数
笔者采用多体动力学仿真软件ADAMS 建立的断路器模型见图1。为了使建立的模型能准确进行动态仿真,必须在各个部件之间按照实际工作情况添加约束关系和载荷。断路器动作时,长轴侧作水平运动,需要添加水平方向滑移副。动触头侧做竖直运动,需添加竖直方向滑移副。
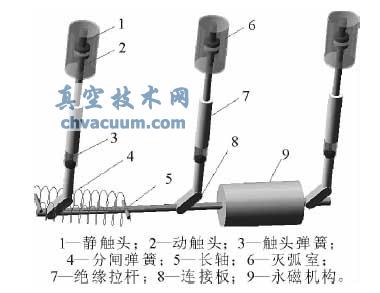
图1 ZW45-12 型真空断路器的仿真模型
长轴与连接板、连接板与绝缘拉杆之间要添加旋转副。在实际工作中断路器运动部件之间存在摩擦,需要在运动副上定义摩擦力。此外,适当添加触头弹簧的预压力可以避免仿真开始时,因为机构反力导致动触头压缩触头弹簧回落的现象。断路器模型建立成功后,还需要通过修改几何模型参数、增加摩擦、定义柔性体、改进载荷函数与定义控制等方法改进样机模型,多次进行优化设计,直至得到预期的断路器模型。文中对断路器样机进行建模和优化的流程图见图2。
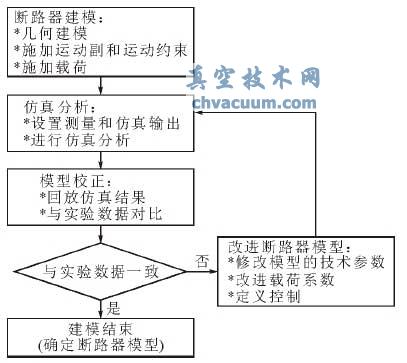
图2 建模流程图
1.2、断路器模型的运动过程分析
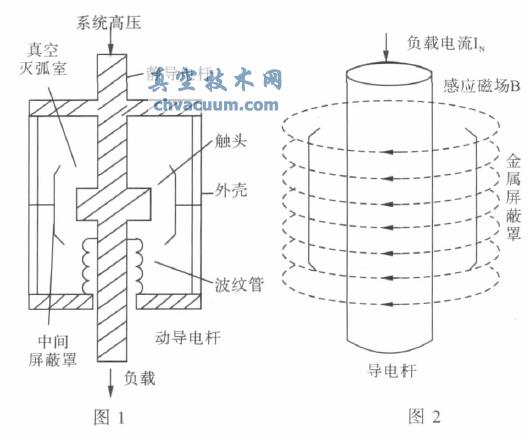
对于该模型而言,在永磁机构中合闸线圈通电产生磁场与永久磁铁磁场叠加产生的电磁吸力以及分闸弹簧拉力的共同作用下,动铁心动作,直接驱动传动机构的长轴作水平运动,连接板将长轴的水平运动转化为绝缘拉杆的竖直运动,从而带动动触头上下动作,实现断路器的分、合闸操作。断路器的合闸位置由永久磁铁保持,分闸位置由分闸弹簧保持。因为动触头侧的动作直接由长轴推动连接板来驱动,开关在工作时主要的运动部件少,中间转换和连接的机构也很少,机构的运动过程简单,具有很高的可靠性。文中建立真空断路器模型的运动简图见图3。
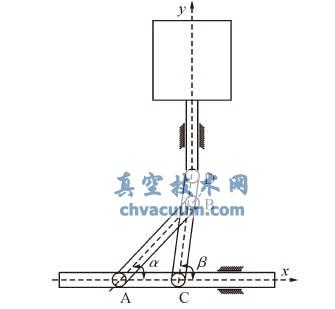
图3 模型的运动简图
4、结语
笔者基于虚拟样机技术建立一台ZW45-12 型永磁机构户外真空断路器的模型。推导出模型分、合闸过程的动态方程,仿真得到断路器分、合闸过程的动态特性曲线。将仿真结果与实验数据对比分析,得出以下结论:
断路器模型的分、合闸动态特性可以达到断路器主要技术参数的要求; 仿真模型的合闸时间为54.6 ms,与实验数据一致,动触头合闸弹跳时间为1.5 ms,拉杆的合闸弹跳幅值为0.36 mm,略小于实验数据;仿真模型的分闸时间为39.7 ms,拉杆的分闸过冲为1.45 mm,与实验数据一致;通过实验验证了仿真结果的准确性,为采用虚拟样机技术研究断路器的故障诊断和优化设计提供了依据。