一种新型智能真空测量仪的研制
真空技术是现代科学技术的一个重要组成部分, 广泛应用于国民经济中的各个领域里, 推动并促进了科技研究和生产技术的发展, 而真空测量是真空技术的一个重要环节。现在真空测量的传感器, 大部分都是用电离规, 并且在中程真空范围用途最广泛。常用的电离真空规测量仪, 都采用模拟电路控制发射电流, 并把它当成固定数来运算, 这样会产生一些不足之处, 例如: 由于外界干扰或元器件老化造成电流有偏差; 或控制环中的漂移产生不稳定, 由此而导致测量误差较大。为消除此类不良现象, 我们应用现代控制理论—PID和Fuzzy控制, 采用数字电路控制发射电流, 控制环中都用16位的高分辨率A/D和D/A,且把发射电流测量值参入运算, 允许发射电流有一定的变化范围。这样既提高了测量精度, 又在它们的线性区域内扩充量程。为保障仪器正常运转, 开机有自检功能,运行有自我保护措施。若超量时,自动关掉规管电源, 并显示“故障”; 为防外界干扰, 仪器中软、硬件加有抗干扰措施。
1、工作原理
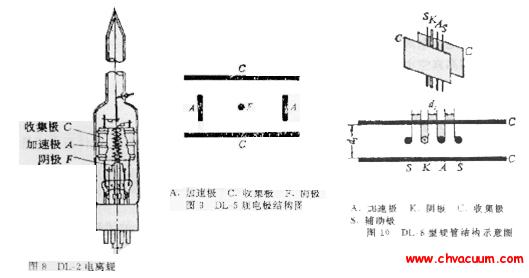
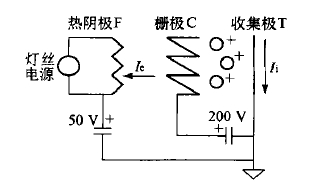
电离规是根据气体电离与气体密度成正比而制成的。在固定结构和固定电压的条件下发射电流ie,收集电流i+ 和真空系统中的压强P 有如下关系
i+=kieP(1)
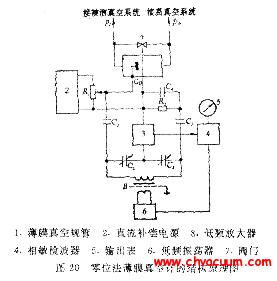
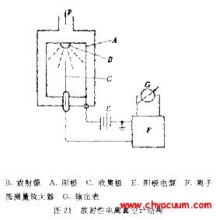
式中 k称为规管的灵敏度。它的结构类同于电子三极管。灯丝加热阴极, 电子获得能量在电场作用下, 脱离阴极跑向栅极。各极的电压和规管的结构决定了规管的常数 , 如DL-5的k=0.015A/Pa。阴极电流的大小与加热灯丝电压紧密相关。根据电离规管的特点, 智能测试仪电路设计由: 单片机与显示部分、闭路控制系统、采样测试部分和各直流电源等四部分所组成, 总体构成如图1 所示。下面分别叙述之。
2、单片机与显示部分
单片机控制各部分工作,协调I/O口动作, 发出显示的数据是仪器的核心部分。这里采用的是8031。为了充分利用单片机的资源, P1.5、外部INTO和定时器组成一个控制发射电流的闭环系统, P1.3用于选择发射电流的大小, P1.0~ P1.1用于选择测量的量程, P1.6启动A/D转换, P1.7判断数据是否溢出, P1.4用于选择测量发射电流或测量收集电流。为了今后进一步扩展留有余地, 选用2764片和8K以上的EPROM片, 都是28脚, 这对升级很方便。为了处理大量数据的信息、纠错方案和软件容错, 需要大容量的RAM,因此扩充2K的RAM,且在I/O上我们也留有I/O口。经过一芯片扩展, 只要与外围设备接上就可以工作。这台测量仪不仅可单独工作, 而且还可与上位机联网通信, 故留有通信口。为了提高设备的可靠性和可维修性, 在软、硬件上都采用保护措施, 为使真空测量能在环境非常恶劣条件下进行, 首先保证CPU 正常, 即使外围线路损坏, 也不能损坏CPU。我们采用缓冲器隔离CPU 与外界打交道, 若线路有故障时, 有报警显示且有自诊功能。硬件上虽具有一定的抗干扰措施,但不能把千变万化的干扰信号完全处理掉, 因此还利用软件的优势, 采用容错技术, 如设置看门狗, 进行捕捉和恢复。另一方面根据采样的数据可以预防过大的电流和电压, 预测故障等。
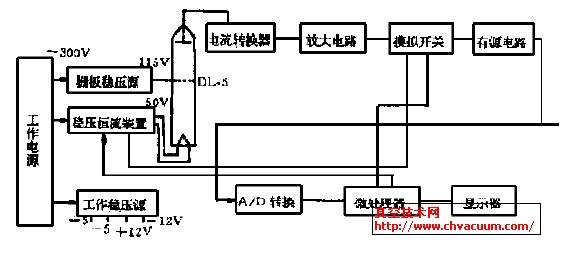
图1 总体结构框图
数码显示器告诉人们测量的数据, 且是故障显示的唯一窗口。考虑CPU工作繁忙, 采用8279芯片。然而一般用8279芯片驱动数码线路都比较复杂而且体积大, 我们采用总线驱动, 直接利用两片74LS244, 这样成本较低, 体积小了。
3、闭环控制系统
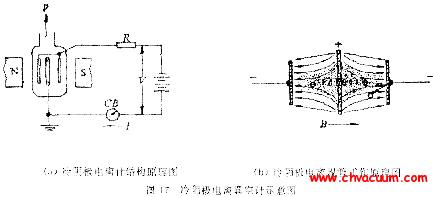
发射电流是一个闭环控制系统。过去设备是往往采用模拟线路来控制, 这样有些不足之处: 发射电流稳定性差, 达到的测量精度不高, 随时间增加而漂移越来越大等。我们在不增加元件的条件下, 改为数字电路控制, 不但克服上述缺点, 而且增加很多优越性。一是扩展量程, 根据公式(1) 在发射电流与收集电流的线性范围内, 真空度高时, 可增大发射电流,使收集电流能在正常测量范围内工作; 同样在真空度低时,降低发射电流; 二是可以根据采样发射电流的数据, 可以预报奇异情况。若在测量真空时, 暴露了大量空气, 它会自动切断灯丝电源; 其三为了提高控制精度和测量精度, 我们采用A/D转换器是十六位双积分器, 导相角的分辨率也是十六位, 电路如图2 所示。这里只需增加模拟开关, 采样在收集极电流电路的基础上, 再增加两条线进入单片机。一条交流同步信号, 进入INTO告诉交流起点。另一条是控制双向可控硅的导通时间。这个时间应用定时器T0, 调相控制加热灯丝电压。控制方法我们采用PID与Fuzzy控制, 好处是上升时间短, 超调量小, 比较平稳, 抗干扰性强。详情见真空技术网另文。
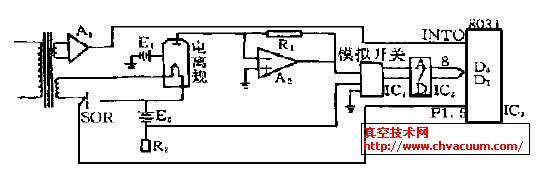
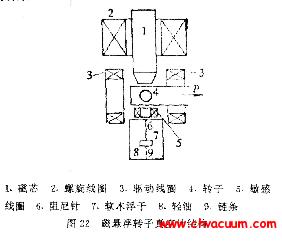
图2 闭环控制系统电路