基于多微处理器的阀门电动装置控制器
1、概述
阀门电动装置是工业自动化系统中的执行单元,广泛应用于化工、石油、冶金、电力等行业的压力、温度、流量控制。它是一种机电一体化的现场设备,以电动机作为动力源,将控制信号转换成相应的机械动作控制各类阀门开启和关闭。随着科学技术的发展,特别是数字和信息技术的发展,阀门电动装置的上方控制系统数字化和信息化程度越来越高,对电动装置的精度、动态特性和功能等方面的要求也越来越高,如友好的人机界面、精确定位、故障诊断和总线通讯等等,这些性能的提高和功能的实现依赖于阀门电动装置控制器。
2、工作原理
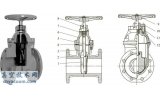
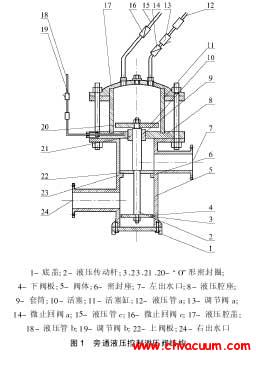
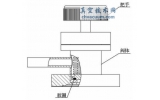
阀门电动装置(图1)控制器接受上方控制系统指令,控制电动装置电机运行,驱动电动装置传动部分工作,并将其工作状态信号反馈给上方系统,从而实现阀门位置控制。阀门电动装置控制器是嵌入式控制系统,它以单片微处理器(MCU)为核心,配合人机界面、信号输入/输出和电机驱动等其他外围电路,通过MCU 内部程序控制整个系统运行。其中MCU是整个系统的核心,MCU 芯片上集成了一个功能简化的计算机系统(CPU,内存,并行总线,输入/输出接口等) ,具有体积小、功耗低、控制功能强、扩展灵活、微型化和使用方便等优点,已在阀门电动装置控制器上广泛采用。

图1 阀门电动装置
目前控制器的MCU所用软件普遍采用前/后台工作方式(图2) 。系统应用程序是一个无限的循环。循环中调用相应的函数完成相应操作,这部分是后台行为。中断服务程序处理异步事件,这部分是前台行为。一般对实时性要求高的操作都是通过中断服务来保证的。因为中断服务提供的信息一直要等到后台程序运行到该处时才能得到处理,所以任务的响应时间取决于整个程序循环的执行时间。

图2 前/后台系统
3、存在问题及解决方案
3.1、存在问题
随着阀门电动装置功能的增加和性能的提高,要求MCU同时处理的任务数量越来越多,对实时性要求高的任务也越来越多,任务数量的增加意味着程序循环时间的加长,而实时性要求高则对后台程序的循环周期提出了较高要求。如果系统后台程序的循环时间超过了处理实时任务的最大间隔时间,系统的实时性就得不到有效保证,控制器也就不能正常稳定工作。
3.2、解决方案
采用模块化设计理念,将阀门电动装置控制分解成多个功能模块,每个对实时性要求高或者程序执行时间较长的的功能模块都有独立的MCU控制,然后通过总线通讯的方式与主控MCU进行数据交换,即多MCU的系统架构。