推荐电镀污水中有机污染物去除工艺
电镀废水中的有机污染物来源主要有3个方面:镀前处理、电镀过程和镀后处理。污水中有机污染物的3种去除方法:生化法、微波化学法和物化法。

-
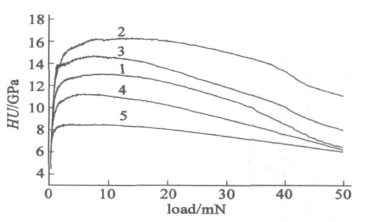
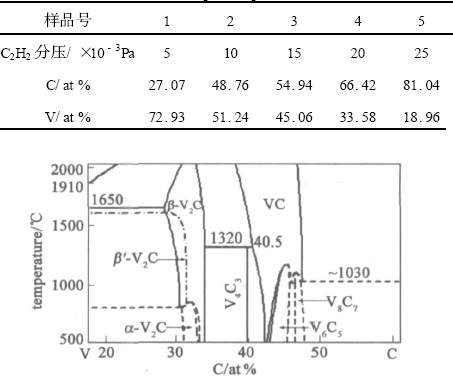
碳化钒薄膜的力学性能分析
利用微力学探针表征碳化钒薄膜力学性能,其硬度和弹性模量分别达到35.5GPa 和358GPa。随着C2H2 分压的提高,薄膜形成六方结构的γ-VC ,并逐渐产生非晶碳相,硬度和弹性模量随之降低。
-
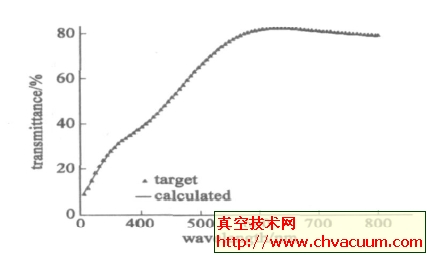
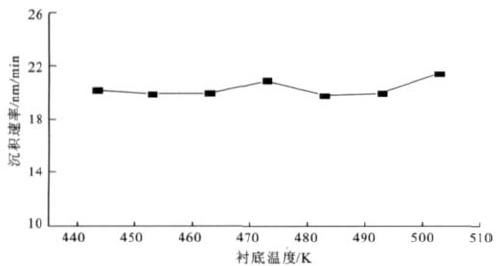
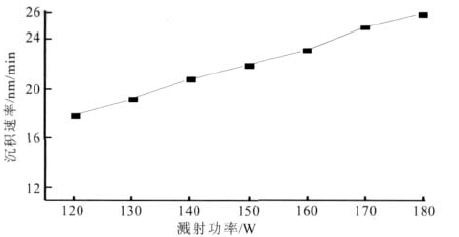
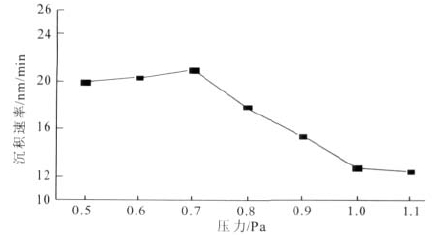
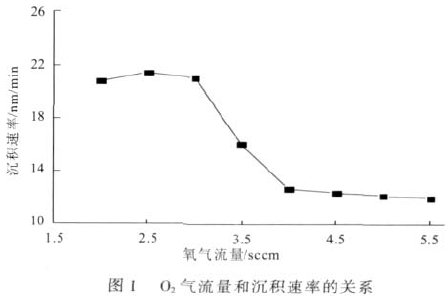
ITO薄膜的透射谱的建模及解谱
用直流磁控溅射法在普通载波片上制备了厚度130nm 左右的ITO 薄膜,分别在100、200、300 和400 ℃下退火1h.测量了退火前后几个样品的XRD 和透射率,利用椭偏解谱方法对几个样品的透射谱进行建模及解谱.
-
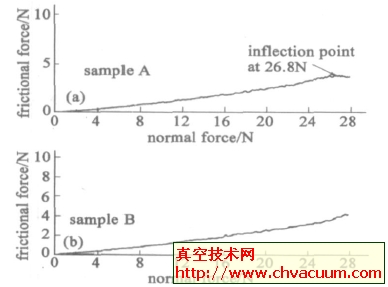
膜基结合力的划痕法实验分析
在瑞士CSM仪器的微划痕测试仪对真空多弧离子镀设备制备的WC2Co/TiN膜基结合力进行划痕实验,系统地介绍了如何利用MST划痕仪所测的声发射数据、摩擦力数据及光学、电子扫描划痕形貌来综合评定膜基结合力,并用WS292 划
-
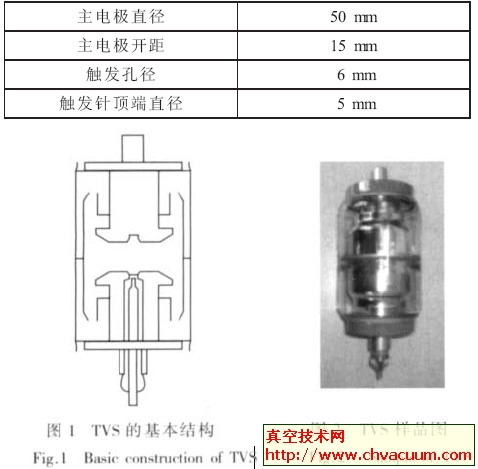
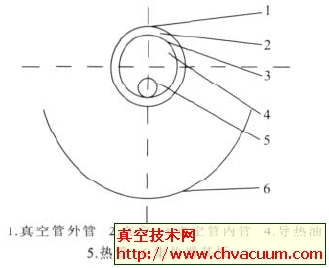
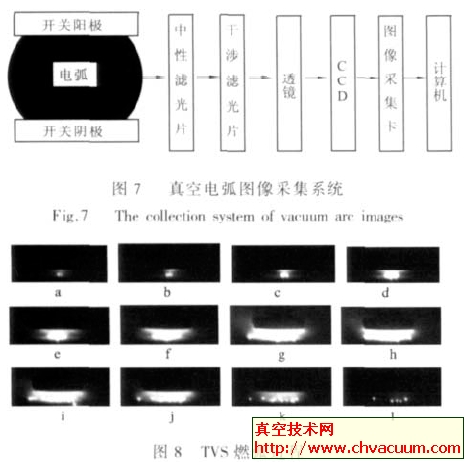
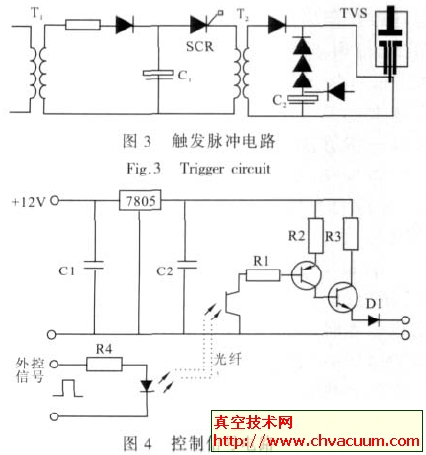
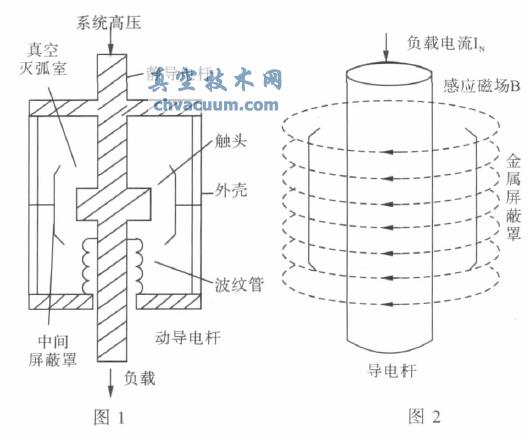
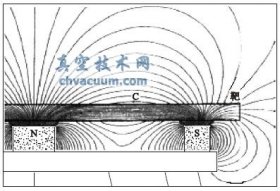
真空触发开关(TVS)的基本结构和工作过程
TVS的基本结构主要包括一个绝缘外壳、一个金属屏蔽罩、一对相距为d的主电极和一个触发极,管内真空度一般维持高真空。TVS的工作过程通常包括触发阶段和主间隙导通阶段。
-
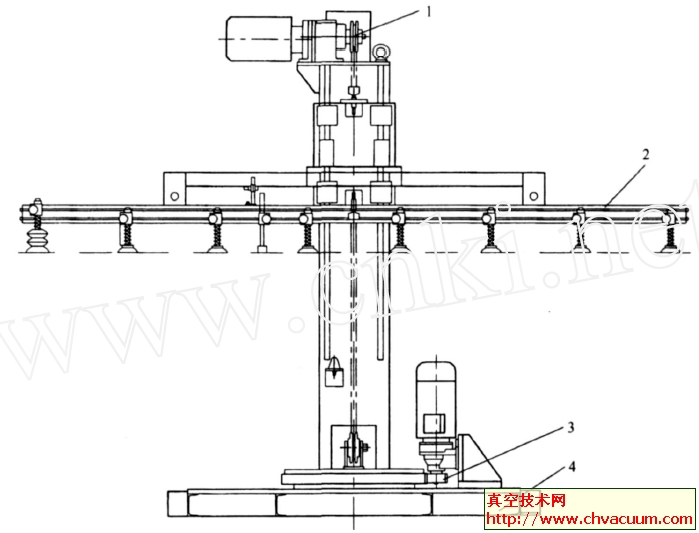
真空吸盘技术在搬运薄钛板材中的应用
介绍自行研制的一种用于专用设备上的自动上、下料机械手,论述真空吸盘技术的应用、吸盘材料的选择、吸力的计算、真空度、真空泵等的选择,以及自动程序和机械手的自动化搬运过程。
真空资讯




推荐阅读


热门专题
阅读排行
- 1真空吸盘的真空负压吸附原理
真空吸盘采用了真空原理,即用真空负压来“吸附”工件以达到夹持
- 2不是所有的衣物被褥都适合用压缩袋收纳

并不是所以的衣物被褥都适合使用真空压缩袋进行收纳,容易出现压
- 3不锈钢真空保温杯生产工艺流程

不锈钢保温杯由内外双层不锈钢制造而成,利用焊接技术把内胆和外
- 4用真空压缩袋收纳棉被的方法

真空压缩袋主要用于装棉被和各种衣服类的一种袋子。 本文教你怎
- 5我国研发时速4000公里真空管道磁悬浮列车
一种最低时速4000公里、能耗不到民航客机1/10、噪音和废气污染及
- 6什么是无尾抽真空保温杯技术?
真空保温杯能够起到保温效果的最重要因素之一就是抽真空。“无尾
- 7真空自耗电弧炉(VAR)的工作原理与特点
真空自耗电弧炉是在真空室中利用电弧的能量来熔炼金属的一种电炉
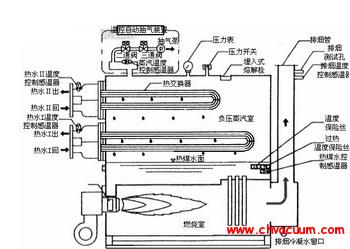
- 8真空热水锅炉的工作原理
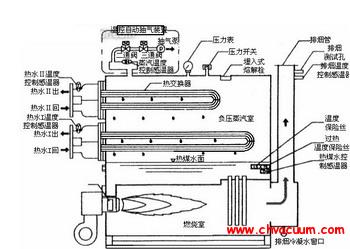
真空热水锅炉的结构是由燃烧室(火炉)、水管、负压蒸汽室、热交换
- 9真空感应熔炼炉(VIM)的工作原理与结构简图
真空感应熔炼炉是真空冶金领域中应用最广的设备之一。本文讲述了
- 10等离子体增强化学气相沉积(PECVD)技术基础
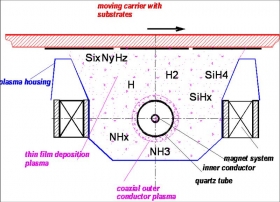
等离子体增强化学气相沉积(PECVD)是借助微波或射频等使含有薄膜